
1. वृत्ताकार बुनाई मशीन प्रौद्योगिकी का परिचय
1. वृत्ताकार बुनाई मशीन का संक्षिप्त परिचय
वृत्ताकार बुनाई मशीन (चित्र 1 में दर्शाई गई) एक ऐसा उपकरण है जो सूती धागे को नलीदार कपड़े में बुनता है। इसका उपयोग मुख्य रूप से विभिन्न प्रकार के उभरे हुए बुनाई वाले कपड़े, टी-शर्ट के कपड़े, छेद वाले विभिन्न पैटर्न वाले कपड़े आदि बुनने के लिए किया जाता है। संरचना के आधार पर, इसे सिंगल जर्सी वृत्ताकार बुनाई मशीन और डबल जर्सी वृत्ताकार बुनाई मशीन में विभाजित किया जा सकता है, जिनका वस्त्र उद्योग में व्यापक रूप से उपयोग किया जाता है।
 2. प्रक्रिया संबंधी आवश्यकताएँ
2. प्रक्रिया संबंधी आवश्यकताएँ
(1) इन्वर्टर में मजबूत पर्यावरणीय प्रतिरोध होना आवश्यक है, क्योंकि कार्यस्थल पर काम करने वाले वातावरण का तापमान अपेक्षाकृत अधिक होता है, और रुई आसानी से शीतलन पंखे को रोक सकती है और उसे नुकसान पहुंचा सकती है, और शीतलन छिद्रों को अवरुद्ध कर सकती है।
(2) लचीले इंचिंग ऑपरेशन फ़ंक्शन की आवश्यकता है। उपकरण के कई स्थानों पर इंचिंग बटन स्थापित हैं, और इन्वर्टर को तेजी से प्रतिक्रिया करने की आवश्यकता है।
(3) गति नियंत्रण में तीन गतियों की आवश्यकता होती है। एक इंचिंग ऑपरेशन गति है, जो आमतौर पर लगभग 6 हर्ट्ज़ होती है; दूसरी सामान्य बुनाई गति है, जिसकी उच्चतम आवृत्ति 70 हर्ट्ज़ तक होती है; तीसरी कम गति वाली संग्रहण प्रक्रिया है, जिसके लिए लगभग 20 हर्ट्ज़ की आवृत्ति की आवश्यकता होती है।
(4) वृत्ताकार बुनाई मशीन के संचालन के दौरान, मोटर का विपरीत दिशा में घूमना और घूर्णन करना पूरी तरह से निषिद्ध है, अन्यथा सुई के बिस्तर की सुइयाँ मुड़ जाएँगी या टूट जाएँगी। यदि वृत्ताकार बुनाई मशीन में एकल-चरण बियरिंग का उपयोग किया जाता है, तो यह नियम लागू नहीं होगा। यदि सिस्टम आगे और पीछे घूमता है, तो यह पूरी तरह से मोटर के आगे और पीछे घूमने पर निर्भर करता है। एक ओर, विपरीत दिशा में घूमने को रोकना आवश्यक है, और दूसरी ओर, घूर्णन को रोकने के लिए डीसी ब्रेकिंग की व्यवस्था करना आवश्यक है।
3. प्रदर्शन संबंधी आवश्यकताएँ
बुनाई के दौरान, भार अधिक होता है और गति बढ़ाने/शुरू करने की प्रक्रिया त्वरित होनी चाहिए, जिसके लिए इन्वर्टर में कम आवृत्ति, उच्च टॉर्क और तीव्र प्रतिक्रिया गति की आवश्यकता होती है। आवृत्ति कनवर्टर मोटर की गति स्थिरीकरण सटीकता और कम आवृत्ति टॉर्क आउटपुट को बेहतर बनाने के लिए वेक्टर नियंत्रण मोड का उपयोग करता है।
4. नियंत्रण वायरिंग
वृत्ताकार बुनाई मशीन का नियंत्रण भाग माइक्रोकंट्रोलर या पीएलसी + मानव-मशीन इंटरफ़ेस नियंत्रण का उपयोग करता है। आवृत्ति कनवर्टर को टर्मिनलों द्वारा चालू और बंद किया जाता है, और आवृत्ति को एनालॉग मात्रा या बहु-स्तरीय आवृत्ति सेटिंग द्वारा निर्धारित किया जाता है।
बहु-गति नियंत्रण के लिए मूलतः दो नियंत्रण योजनाएँ हैं। एक है आवृत्ति निर्धारित करने के लिए एनालॉग का उपयोग करना। चाहे वह जॉगिंग हो या उच्च-गति और निम्न-गति संचालन, एनालॉग सिग्नल और संचालन निर्देश नियंत्रण प्रणाली द्वारा दिए जाते हैं; दूसरी है आवृत्ति कनवर्टर का उपयोग करना। अंतर्निर्मित बहु-स्तरीय आवृत्ति सेटिंग में, नियंत्रण प्रणाली बहु-स्तरीय आवृत्ति स्विचिंग सिग्नल देती है, जॉगिंग इन्वर्टर द्वारा प्रदान की जाती है, और उच्च-गति वीविंग आवृत्ति इन्वर्टर की एनालॉग मात्रा या डिजिटल सेटिंग द्वारा दी जाती है।
2. साइट पर आवश्यक शर्तें और चालू करने की योजना
(1) ऑनसाइट आवश्यकताएँ
वृत्ताकार बुनाई मशीन उद्योग में इन्वर्टर के नियंत्रण कार्यों के लिए अपेक्षाकृत सरल आवश्यकताएं होती हैं। सामान्यतः, इसे स्टार्ट और स्टॉप को नियंत्रित करने के लिए टर्मिनलों से जोड़ा जाता है, एनालॉग आवृत्ति दी जाती है, या आवृत्ति सेट करने के लिए मल्टी-स्पीड का उपयोग किया जाता है। इंचिंग या धीमी गति से चलने के लिए तीव्र गति की आवश्यकता होती है, इसलिए इन्वर्टर को मोटर को नियंत्रित करके कम आवृत्ति पर उच्च निम्न-आवृत्ति टॉर्क उत्पन्न करने की आवश्यकता होती है। सामान्यतः, वृत्ताकार बुनाई मशीनों के अनुप्रयोग में, आवृत्ति कनवर्टर का V/F मोड पर्याप्त होता है।
(2) डिबगिंग योजना: हम जो योजना अपनाते हैं वह है: C320 श्रृंखला सेंसरलेस करंट वेक्टर इन्वर्टर, पावर: 3.7 और 5.5 किलोवाट
3. डीबगिंग पैरामीटर और निर्देश
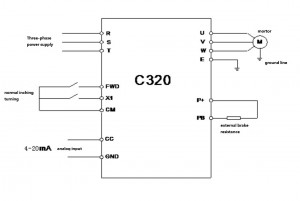
1. वायरिंग आरेख
2. डिबग पैरामीटर सेटिंग
(1) F0.0=0 VF मोड
(2) F0.1=6 आवृत्ति इनपुट चैनल बाह्य धारा संकेत
(3) F0.4=0001 बाह्य टर्मिनल नियंत्रण
(4) F0.6=0010 विपरीत घूर्णन रोकथाम मान्य है
(5) F0.10=5 त्वरण समय 5S
(6) F0.11=0.8 मंदन समय 0.8S
(7) F0.16=6 वाहक आवृत्ति 6K
(8) F1.1=4 टॉर्क बूस्ट 4
(9) F3.0=6 X1 को आगे की ओर जॉग पर सेट करें
(10) F4.10=6 जॉग आवृत्ति को 6 हर्ट्ज़ पर सेट करें
(11) F4.21=3.5 जॉग त्वरण समय को 3.5 सेकंड पर सेट करें
(12) F4.22=1.5 जॉग मंदी समय को 1.5S पर सेट करता है
डीबगिंग नोट्स
(1) सबसे पहले, मोटर की दिशा निर्धारित करने के लिए जॉग करें।
(2) जॉगिंग के दौरान कंपन और धीमी प्रतिक्रिया की समस्याओं के संबंध में, जॉगिंग के त्वरण और मंदी के समय को आवश्यकतानुसार समायोजित करने की आवश्यकता है।
(3) वाहक तरंग और टॉर्क बूस्ट को समायोजित करके निम्न-आवृत्ति टॉर्क में सुधार किया जा सकता है।
(4) रुई वायु वाहिनी को अवरुद्ध कर देती है और पंखा रुक जाता है, जिससे इन्वर्टर की ऊष्मा का अपव्यय खराब हो जाता है। यह स्थिति अक्सर उत्पन्न होती है। वर्तमान में, सामान्य इन्वर्टर थर्मल अलार्म को अनदेखा कर देता है और फिर उपयोग जारी रखने से पहले वायु वाहिनी में मौजूद रुई को मैन्युअल रूप से हटा देता है।
पोस्ट करने का समय: 8 सितंबर 2023